Project LiftOff

Project Liftoff is a 3lb MeltyBrain — a robot that moves via translational drift while its entire body spins at 2,000–4,000 RPM. Built and driven by Andrew Kazmer and Jim Kazmer it has competed at NHRL every year since the league's inception in 2019, and in 2021 became the first MeltyBrain to win an NHRL event. Project Liftoff has qualified for the NHRL Word Championship three times, in 2021, 2022, and 2025.
As of May 2026, Project Liftoff is in its 9th major design iteration.
Overview
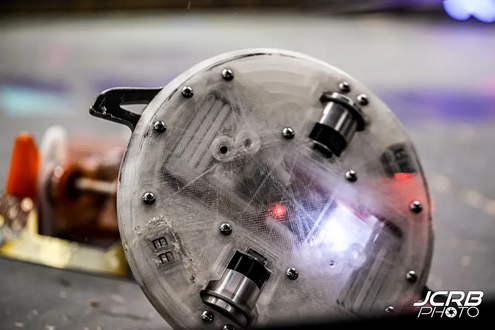
Unlike many early MeltyBrains, Project Liftoff does not use an IR beacon. Instead, it carries dual opposed 3-axis accelerometers mounted at 45 degrees relative to the axis of rotation. This accelerometer configuration creates a deterministic system, and allows the bot to adapt to changes in the center of rotation mid fight.
Two pairs of directional LEDs (top/bottom and front/back) indicate orientation relative to the bot — not the arena. When properly tuned, these LEDs hold steady; they only shift as the bot ricochets off arena walls. The driver controls the bot relative to its "front" (the green LED), much like any conventional combat robot.
| Driver | Andrew Kazmer (Primary), Jim Kazmer (Alternate) |
|---|---|
| Team Captain | Jim Kazmer |
| Weight Class | 3lb |
| Type | MeltyBrain Spinner |
| Body Material | TPU shell, AR500 weapon ring |
| Weapon | Meltybrain with Modular Tooth Configurations |
| Drive Motors | 2× PropDrive 2836 1200kv hub motors, 1.55" titanium "cleat" wheels |
| Battery | 2× 4S 550mAh LiPo in parallel |
| Spin Rate | 2,000–4,000 RPM |
| First Event | March 2019 NHRL |
| Notable Achievements | First MeltyBrain to win an NHRL event (Sept 2021), 3-time World Championship Qualifier, 3rd Place finish at 2022 World Championship |
Design Philosophy
Project Liftoff has used several laser- or waterjet-cut AR500 steel rings as its weapon throughout its lifetime. These rings are sandwiched or otherwise mounted to 3D-printed TPU bodies that house the primary electronics and battery. This construction has proven both durable and remarkably adaptable — it has allowed the design to evolve significantly across nine revisions while preserving the core platform. In Revision 8, Project Liftoff gained the capability to use modular weapons, allowing mid-cutter, undercutter, and flying wedge configurations based on the desired weapon interaction with the opponent.

Revision History
Rev 1.0 — March 2019

First appearance, at the March 2019 NHRL event. The original weapon was an 8" diameter aluminum pipe cut into two ½" thick slices with a notch for an AR500 tooth (two bolt holes).
- Processor: Arduino Nano
- Accelerometer: MPU-6050 (±16g, 12-bit)
- Receiver Interface: standard RC-PWM into UART
- Motor Control: OneShot125 via PWM manipulation @ ~800Hz
Rev 1.1 — May 2019

Switched from 8" aluminum rings to a 9" AR500 ring with a single tooth (and hand-cut HDPE body). The pointed AR500 tooth proved too aggressive — it became embedded in the arena wall on multiple occasions.
Rev 1.2 — August 2019

Refinements to the body and weapon ring profile.
Derivative: Sir Pops A Lot (Rev 1.15, August 2019) — pictured below.

Rev 2.0 — 2020

Major electronics overhaul. The MPU-6050 accelerometer was retired in favor of motor eRPM telemetry from the ESCs via bidirectional dShot.
- Processor: Teensy 4.0
- Accelerometer: none — used motor eRPM telemetry
- Receiver Interface: RC-SBUS into UART
- Motor Control: dShot600 via SPI manipulation @ 8000Hz
- Additional Sensors: active IR
- Body: CNC'd HDPE
- Weapon: new 8" AR500 ring with a more blunt tooth profile
Derivative: Flip-N-Cut (Rev 2.05, July 2020).

Rev 3 — 2021

Same electronics as Rev 2, with an improved algorithm, revised wheel orientation, and a return to a dedicated accelerometer.
- Processor: Teensy 4.0
- Accelerometer: H3LIS331DL (±400g, 16-bit)
- Receiver Interface: RC-SBUS into UART
- Motor Control: dShot600 via SPI manipulation @ 8000Hz
- Additional Sensors: active IR
- Battery: upgraded from 3S 1300 to 2x 4S 650 mAh in parallel.
- Construction: new "motor pod" sandwiched by two clamshell HDPE halves
- Wheels placed inline with the weapon tooth (later reverted)
- Algorithm simplification
Rev 4 — May / July 2021 - Motor Durability is Kryptonite
The hunt for a more durable motor.
- May 2021: custom motor with internal thrust bearing using "no-name" stators (the thrust bearing still failed by the third fight).
- July 2021: thrust bearing fitted inside a PropDrive motor by combining a PD-2826 stator with a PD-2830 motor can. (The same trick works with a PD-2830 stator and a PD-2836 can — the PD-2836 is really a 2834.) This sacrificed power for durability; the new failure points became the set screws and motor axle.
- Wheel axis returned to 90° from the weapon (inline wheels worsened "hockey-pucking").
- Weight distribution made fully symmetric: instead of a heavy counter-balance opposite a single tooth (which sent the chassis flying when the tooth stopped on impact), the design moved to two symmetric weapon teeth.
- Body changed to a full-round HDPE shell (re-designed and re-cut).
- Weapon ring made narrower to offset the heavier shell, with bolt holes removed to maximize strength.
- First titanium wheels. Thanks to Joe Fabbiani (SMEEEEEEEEEE) and Calvin Iba (Lynx) for sharing the idea.
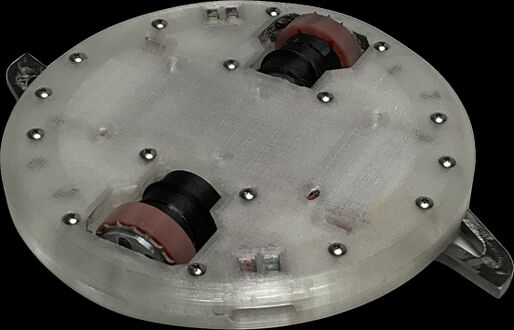
Rev 5 — September 2021 - Hubmotors deliver the win
.jpg)

The breakout revision. Project LiftOff went undefeated at the September 2021 NHRL event, winning the 3lb division with 4 KOs and 3 judges' decisions — and becoming the first MeltyBrain to win an NHRL event.
- Motor: upgraded to PropDrive 2836 for more power.
- Hub Motor design:
- 6mm dead axle
- Two 626 bearings (1,000+ lb dynamic load)
- Custom-machined aluminum inner (motor can) and outer (wheel) hubs, done on a home CNC at 0.2mm layer height
- Titanium wheels via SendCutSend
- No more set-screw failures
- Thanks to Brian Boxell (Eruption) for hub-motor guidance.
- Weapon ring redesign: same 0.25" AR500, sourced via SendCutSend. Reduced from 326g (near-full circle) to 241g (near-rectangular). No bolt holes; tapered through the middle.
- HDPE shell redesigned to match.
Known Rev 5 issues (carried into Nov 2021)
- Aluminum CNC mistakes (over-clamping, double-sided alignment) caused slight defects in the motor hubs, leading to Hub Motor misalignment, friction, and lost power.
- The bot was never properly software-tuned at the November event — hardware fixes ran until midnight Friday, controls were upside-down and backwards all of Saturday, and IR object/wall detection was unusable due to misalignment.
Rev 6 — February 2022 - Jump from UHMW to TPU

After failures during the December 2021 finals, UHMW and HDPE were retired as shell materials — both proved too prone to failure around the metal ring.
- Shell: 3D-printed in TPU
- New AR500 weapon options: a long-reach weapon made of stacked ⅛" AR500 (welded), via SendCutSend. Lets Project Liftoff play the reach game against other horizontals and keeps big-wheel bots away from the chassis. Structural integrity of the welds is questionable.
- New PCB iteration: smaller, lighter, smarter component layout. Bluetooth telemetry to remote external devices (battery, temperature, speed) — functional but requires an add-on board that's tight to fit in 3 lbs.
Rev 7 — Sept / Nov / December 2022 - The Breakthrough

Perhaps the golden era of Project Liftoff improvements and performance, Liftoff went on an absolute tear finishing 3rd in back to back November and World Championship events, with a combined record of 9 wins and 4 losses.
- Shell layout reworked so the hub motors could be rotated with the wheels facing outward instead of inward — a better effective gear ratio, trading top speed for spin-up torque.
- New PCB layout supporting multiple accelerometers, fewer parts, and improved component selection.
- Better-machined inner/outer hubs.
- Thinner titanium wheels.
- Software improvements for cleaner drifting.
- First revision of autonomous software.
Rev 8 — 2023, 2024, and 2025 - Incremental Improvements
Project Liftoff only competed once in 2023 and once in 2024. Iterative shell changes were made during this period, but the bot was mostly unchanged from 2022. In 2025 the competition frequency picked up again, and the combination of a newly modular weapon system and software improvements resulted in Andrew returning from a three year driving hiatus to deliver a World Championship qualifying performance in November 2025.
Rev 9 — 2026 - Software Refresh, Wheel Improvements
New hybrid cleat/silicone wheels are intended to improve traction later in the match, after the cleats start to wear down.
- Microcontroller: Teensy 4.0
- Accelerometers: 2x H3LIS331DL (±400g, 16-bit)
- Receiver Interface: RC-SBUS into UART
- Motor Control: Bidirectional dShot600 via SPI manipulation @ 8000Hz
- Motors / Drive: Propdrive 2836 1200kv Hubmotors
- Weapon / Ring: Swappable mid-cutter, undercutter, and flying wedge configurations
- Shell / Body: TPU
Notable Fights
Career Highlights
- September 2021 — NHRL 3lb Champion (undefeated): 4 KOs, 3 judges' decisions. The first and only MeltyBrain to win an NHRL event.
- December 2022 — 3rd Place at NHRL World Championship
- November 2025 — Fight of the Year vs Sir Slicey: Narrow judges decision loss in a brutal back and forth matchup.
Featured Match
Related Bots
The Project Liftoff platform has spawned several derivatives and heavier siblings:
- Flip N' Cut — Derivative robot based on the flying wedge concept. Likely retired due to Project Liftoff modularity.
- Sir Pops A Lot — 3lb derivative, precursor to Flip and Cut.
- DeepMelt — Autonomous variant of the Project Liftoff platform.
- Flip-N-Cut 12 — Team Liftoff's 12-pound MeltyBrain robot based on the flying wedge concept.
- Project LiftOff-30 — 30lb sibling, scaling the same MeltyBrain design philosophy up two weight class.
Statistics
Info
- Rank: #40 in 3lb.
- Last 5 fights: WLLLL
- Current streak: L4 (0 KOs/KO'd)
- Longest winning streak: 7 (4 KOs)
- Longest losing streak: 4 (0 KO'd)
- Avg fight time (seconds): 135.6
Record
| Year | Events | Fights | W | L | % | KOs | KO'd |
|---|---|---|---|---|---|---|---|
| 2018-19 | 3 | 10 | 6 | 4 | 0.600 | 4 | 4 |
| 2020 | 3 | 10 | 4 | 6 | 0.400 | 3 | 4 |
| 2021 | 6 | 20 | 12 | 8 | 0.600 | 8 | 3 |
| 2022 | 4 | 21 | 13 | 8 | 0.619 | 5 | 5 |
| 2023 | 1 | 4 | 3 | 1 | 0.750 | 1 | 0 |
| 2024 | 1 | 3 | 2 | 1 | 0.667 | 0 | 1 |
| 2025 | 3 | 13 | 7 | 6 | 0.538 | 3 | 4 |
| 2026 | 4 | 15 | 8 | 7 | 0.533 | 3 | 2 |
| All-Time | 25 | 96 | 55 | 41 | 0.573 | 27 | 23 |
Events
| Date | Fought as | Reached | Place | Fights | W | L | KOs | KO'd |
|---|---|---|---|---|---|---|---|---|
| March 9, 2019 | Losers 2 | 3 | 2 | 1 | 2 | 1 | ||
| May 10, 2019 | Losers 5 | 4th | 6 | 4 | 2 | 2 | 2 | |
| August 10, 2019 | Project Liftoff | Losers 1 | 1 | 0 | 1 | 0 | 1 | |
| July 18, 2020 | Losers 3 | 4 | 2 | 2 | 2 | 1 | ||
| July 19, 2020 | Project Liftoff | Losers 4 | 4 | 2 | 2 | 1 | 1 | |
| September 19, 2020 | Project Liftoff | Losers 1 | 2 | 0 | 2 | 0 | 2 | |
| March 20, 2021 | Project LiftOff | Losers 3 | 3 | 1 | 2 | 0 | 0 | |
| May 15, 2021 | Project Liftoff | Losers 3 | 3 | 1 | 2 | 1 | 2 | |
| July 24, 2021 | Project Liftoff | Losers 6 | 2 | 1 | 1 | 1 | 0 | |
| September 18, 2021 | Project Liftoff | Final | 1st | 7 | 7 | 0 | 4 | 0 |
| November 13, 2021 | Project LiftOff | Losers 1 | 1 | 0 | 1 | 0 | 1 | |
| December 18, 2021 | Project LiftOff | Losers 4 | 4 | 2 | 2 | 2 | 0 | |
| April 23, 2022 | Project LiftOff | Elimination 4 | 4 | 2 | 2 | 2 | 2 | |
| September 17, 2022 | Project Liftoff | Elimination Round 5 | 4 | 2 | 2 | 1 | 1 | |
| November 12, 2022 | Project LiftOff | Elimination Final | 3rd | 7 | 5 | 2 | 2 | 0 |
| December 17, 2022 | Project LiftOff | Elimination Final | 3rd | 6 | 4 | 2 | 0 | 2 |
| March 18, 2023 | Project LiftOff | Round 5 | 4 | 3 | 1 | 1 | 0 | |
| March 2, 2024 | Project LiftOff | Round of 32 | 3 | 2 | 1 | 0 | 1 | |
| May 3, 2025 | Project LiftOff | Prelim Rd. 3 | 3 | 1 | 2 | 0 | 1 | |
| November 1, 2025 | Project LiftOff-3 | Semifinals | 8 | 6 | 2 | 3 | 1 | |
| December 6, 2025 | Project LiftOff-3 | Prelims Rd. 2 | 2 | 0 | 2 | 0 | 2 | |
| March 7, 2026 | Project LiftOff-3 | Round of 16 | 4 | 3 | 1 | 1 | 0 | |
| April 4, 2026 | Project LiftOff-3 | Round of 32 | 3 | 2 | 1 | 2 | 1 | |
| May 2, 2026 | Project LiftOff-3 | Round of 32 | 5 | 3 | 2 | 0 | 1 | |
| May 16, 2026 | Project LiftOff-3 | Prelims Rd. 3 | 3 | 0 | 3 | 0 | 0 |
Opponents
| Opponent | Fights | W | L | KOs | KO'd | Last Meeting |
|---|---|---|---|---|---|---|
| Eruption | 3 | 2 | 1 | 1 | 1 | December 17, 2022 |
| Lynx | 3 | 0 | 3 | 0 | 2 | December 17, 2022 |
| Judge's Dream | 2 | 2 | 0 | 0 | 0 | September 18, 2021 |
| SawMurai | 2 | 1 | 1 | 1 | 0 | July 24, 2021 |
| Polywog | 2 | 1 | 1 | 0 | 1 | December 17, 2022 |
| Chubby Unicorn | 2 | 1 | 1 | 0 | 1 | December 17, 2022 |
| Wasp | 2 | 0 | 2 | 0 | 2 | May 10, 2019 |
| Sir Slicey | 2 | 0 | 2 | 0 | 1 | December 6, 2025 |
| Anubis | 2 | 0 | 2 | 0 | 0 | May 16, 2026 |
| Caldera | 2 | 0 | 2 | 0 | 0 | December 18, 2021 |
| Jack Rabbit | 2 | 0 | 2 | 0 | 0 | July 19, 2020 |
| [[]] | 1 | 1 | 0 | 1 | 0 | April 4, 2026 |
| Pretty In Pink | 1 | 1 | 0 | 1 | 0 | April 4, 2026 |
| [[]] | 1 | 1 | 0 | 1 | 0 | March 7, 2026 |
| Comet | 1 | 1 | 0 | 1 | 0 | November 1, 2025 |
| Skyhook | 1 | 1 | 0 | 1 | 0 | November 1, 2025 |
| Square | 1 | 1 | 0 | 1 | 0 | November 1, 2025 |
| Black Havoc | 1 | 1 | 0 | 1 | 0 | March 18, 2023 |
| Professor Hex | 1 | 1 | 0 | 1 | 0 | November 12, 2022 |
| HiveLighter | 1 | 1 | 0 | 1 | 0 | November 12, 2022 |
| Crisis (II) | 1 | 1 | 0 | 1 | 0 | September 17, 2022 |
| Arr See Saw | 1 | 1 | 0 | 1 | 0 | April 23, 2022 |
| Scab Armour | 1 | 1 | 0 | 1 | 0 | April 23, 2022 |
| Starchild | 1 | 1 | 0 | 1 | 0 | December 18, 2021 |
| Voxel (3lb) | 1 | 1 | 0 | 1 | 0 | December 18, 2021 |
| Dark Princess | 1 | 1 | 0 | 1 | 0 | September 18, 2021 |
| Razor Storm | 1 | 1 | 0 | 1 | 0 | September 18, 2021 |
| Booooring | 1 | 1 | 0 | 1 | 0 | September 18, 2021 |
| Be Careful What You Wish For | 1 | 1 | 0 | 1 | 0 | September 18, 2021 |
| OffTrack | 1 | 1 | 0 | 1 | 0 | May 15, 2021 |
| BB2X | 1 | 1 | 0 | 1 | 0 | July 19, 2020 |
| Yes | 1 | 1 | 0 | 1 | 0 | July 18, 2020 |
| Bad Bot | 1 | 1 | 0 | 1 | 0 | May 10, 2019 |
| Kill Joy | 1 | 1 | 0 | 1 | 0 | May 10, 2019 |
| Maw | 1 | 1 | 0 | 1 | 0 | March 9, 2019 |
| Cookie Monster | 1 | 1 | 0 | 1 | 0 | March 9, 2019 |
| [[]] | 1 | 1 | 0 | 0 | 0 | May 2, 2026 |
| [[]] | 1 | 1 | 0 | 0 | 0 | May 2, 2026 |
| Ironhide | 1 | 1 | 0 | 0 | 0 | May 2, 2026 |
| Blink | 1 | 1 | 0 | 0 | 0 | March 7, 2026 |
| Bee-Roll | 1 | 1 | 0 | 0 | 0 | March 7, 2026 |
| Actual Size | 1 | 1 | 0 | 0 | 0 | November 1, 2025 |
| Temporal Terror | 1 | 1 | 0 | 0 | 0 | November 1, 2025 |
| Colossus | 1 | 1 | 0 | 0 | 0 | November 1, 2025 |
| Zmeya | 1 | 1 | 0 | 0 | 0 | May 3, 2025 |
| Ghastly | 1 | 1 | 0 | 0 | 0 | March 2, 2024 |
| Black Beans | 1 | 1 | 0 | 0 | 0 | March 2, 2024 |
| Kamino | 1 | 1 | 0 | 0 | 0 | March 18, 2023 |
| Plot Twist | 1 | 1 | 0 | 0 | 0 | March 18, 2023 |
| Sepi01 | 1 | 1 | 0 | 0 | 0 | December 17, 2022 |
| Komodo | 1 | 1 | 0 | 0 | 0 | December 17, 2022 |
| Red Hawk | 1 | 1 | 0 | 0 | 0 | November 12, 2022 |
| War?HARD! | 1 | 1 | 0 | 0 | 0 | November 12, 2022 |
| Ablation | 1 | 1 | 0 | 0 | 0 | September 17, 2022 |
| Murple | 1 | 1 | 0 | 0 | 0 | September 18, 2021 |
| Black Adder | 1 | 1 | 0 | 0 | 0 | March 20, 2021 |
| Oops!.. I did it again.. | 1 | 1 | 0 | 0 | 0 | July 19, 2020 |
| Foiled Again | 1 | 1 | 0 | 0 | 0 | May 10, 2019 |
| Nitro Hornet | 1 | 1 | 0 | 0 | 0 | May 10, 2019 |
| Cicero | 1 | 0 | 1 | 0 | 1 | May 2, 2026 |
| Zenith (II) | 1 | 0 | 1 | 0 | 1 | April 4, 2026 |
| Jackalope | 1 | 0 | 1 | 0 | 1 | December 6, 2025 |
| Prince | 1 | 0 | 1 | 0 | 1 | November 1, 2025 |
| TAILSPIN | 1 | 0 | 1 | 0 | 1 | May 3, 2025 |
| Onna-musha | 1 | 0 | 1 | 0 | 1 | March 2, 2024 |
| Hurt Caboose | 1 | 0 | 1 | 0 | 1 | April 23, 2022 |
| Spartan | 1 | 0 | 1 | 0 | 1 | November 13, 2021 |
| Wumbo | 1 | 0 | 1 | 0 | 1 | May 15, 2021 |
| Cybot | 1 | 0 | 1 | 0 | 1 | September 19, 2020 |
| Shreddit Bro | 1 | 0 | 1 | 0 | 1 | September 19, 2020 |
| Jack Move | 1 | 0 | 1 | 0 | 1 | July 19, 2020 |
| Crisis (I) | 1 | 0 | 1 | 0 | 1 | July 18, 2020 |
| Maelstrom | 1 | 0 | 1 | 0 | 1 | August 10, 2019 |
| SMEEEEEEEEEEEEEEEEE | 1 | 0 | 1 | 0 | 1 | March 9, 2019 |
| THE WALL PT2 | 1 | 0 | 1 | 0 | 0 | May 16, 2026 |
| TurboFIEND | 1 | 0 | 1 | 0 | 0 | May 16, 2026 |
| Chainsaw Kitty | 1 | 0 | 1 | 0 | 0 | March 7, 2026 |
| Snowdrift | 1 | 0 | 1 | 0 | 0 | May 3, 2025 |
| Voxel v;1 | 1 | 0 | 1 | 0 | 0 | March 18, 2023 |
| Stoneforge | 1 | 0 | 1 | 0 | 0 | November 12, 2022 |
| Fully Defined | 1 | 0 | 1 | 0 | 0 | November 12, 2022 |
| Hound | 1 | 0 | 1 | 0 | 0 | September 17, 2022 |
| Silk | 1 | 0 | 1 | 0 | 0 | March 20, 2021 |
Click "Expand" to see this table.
Full Fight History
| Date | Opponent | Round | Result | By | Points | Fight Length (s) | Video |
|---|---|---|---|---|---|---|---|
| March 9, 2019 | SMEEEEEEEEEEEEEEEEE | Winners 1 | Loss | KO | 191 | https://youtu.be/kkKFOXhK-N8 | |
| March 9, 2019 | Cookie Monster | Losers 1 | Win | KO | 87 | https://youtu.be/NZ0MGYfzH1A | |
| March 9, 2019 | Maw | Losers 2 | Win | KO | 110 | https://youtu.be/GYPio_R9Nbw | |
| May 10, 2019 | Wasp | Winners 1 | Loss | KO | 37 | https://youtu.be/FXrn5Pc-kpM | |
| May 10, 2019 | Bad Bot | Losers 1 | Win | KO | 36 | https://youtu.be/Nk_Ww_wjG0g | |
| May 10, 2019 | Kill Joy | Losers 2 | Win | KO | 35 | https://youtu.be/slhqf76B28Y | |
| May 10, 2019 | Nitro Hornet | Losers 3 | Win | Judges Decision | 240 | https://youtu.be/w6PuIMEVgPA | |
| May 10, 2019 | Foiled Again | Losers 4 | Win | Judges Decision | 240 | https://youtu.be/KbC85bAwS1s | |
| May 10, 2019 | Wasp | Losers 5 | Loss | KO | 22 | https://youtu.be/wcSgpkXklus | |
| August 10, 2019 | Tiny Huge | Winners 1 | Loss | Forfeit | 0.00 | ||
| August 10, 2019 | Maelstrom | Losers 1 | Loss | KO | -1.31 | 153 | https://youtu.be/_ErE7kddM80?t=1738 |
| July 18, 2020 | Crisis (I) | Winners 2 | Loss | KO | -1.13 | 61 | https://youtu.be/l3PcB1StgFc |
| July 18, 2020 | SawMurai | Losers 1 | Win | KO | 1.00 | 150 | https://youtu.be/K2yvU7pGh7w |
| July 18, 2020 | Yes | Winners 3 | Win | KO | 55 | https://youtu.be/sa132eFm5yQ | |
| July 18, 2020 | Jack Rabbit | Losers 3 | Loss | Judges Decision | 240 | https://youtu.be/MEa9t6DcClc | |
| July 19, 2020 | BB2X | Winners 2 | Win | KO | 1.00 | 74 | https://youtu.be/8wpOl1d6RNU |
| July 19, 2020 | Jack Rabbit | Winners 3 | Loss | Judges Decision | -1.15 | 180 | https://youtu.be/a5t4JmN0osI |
| July 19, 2020 | Oops!.. I did it again.. | Losers 3 | Win | Judges Decision | 1.00 | 180 | https://youtu.be/EPlzbLuOrVk |
| July 19, 2020 | Jack Move | Losers 4 | Loss | KO | -1.00 | 92 | https://youtu.be/dGqAdWRw-fc |
| September 19, 2020 | Shreddit Bro | Winners 1 | Loss | KO | -1.00 | 50 | https://youtu.be/43yxPZlrikE |
| September 19, 2020 | Cybot | Losers 1 | Loss | KO | -1.13 | 71 | https://youtu.be/hUkh1w0jhno |
| February 6, 2021 | Drum Go Dum | Winners 1 | Loss | Forfeit | 0.00 | ||
| February 6, 2021 | Horvoc | Losers 1 | Loss | Forfeit | 0.00 | ||
| March 20, 2021 | Black Adder | Winners 2 | Win | Judges Decision | 1.00 | 180 | https://youtu.be/MjKsedVz4zI |
| March 20, 2021 | Silk | Winners 3 | Loss | Judges Decision | -1.00 | 180 | https://youtu.be/y-SpTxTiP_8 |
| March 20, 2021 | Caldera | Losers 3 | Loss | Judges Decision | -1.08 | 180 | https://youtu.be/-EwCzRLXJVo |
| May 15, 2021 | OffTrack | Winners 2 | Win | KO | 1.00 | 87 | https://youtu.be/R2w6HwN-8A4 |
| May 15, 2021 | Lynx | Winners 3 | Loss | KO | -1.00 | 43 | https://youtu.be/5elaqlzA60k?t=16348 |
| May 15, 2021 | Wumbo | Losers 3 | Loss | KO | -1.14 | 137 | https://youtu.be/5elaqlzA60k?t=24734 |
| July 24, 2021 | Unhinged | Winners 1 | Win | Forfeit | 0.00 | ||
| July 24, 2021 | Bumble Hooves | Winners 2 | Win | Forfeit | 0.00 | ||
| July 24, 2021 | Eruption | Winners 3 | Win | KO | 1.07 | 124 | https://youtu.be/_X_fSdJPJvQ |
| July 24, 2021 | SawMurai | Winners 4 | Loss | Judges Decision | -1.00 | 180 | https://youtu.be/KxIHvfQ52mA |
| July 24, 2021 | Bone Collector | Losers 6 | Loss | Forfeit | 0.00 | ||
| September 18, 2021 | Be Careful What You Wish For | Winners 2 | Win | KO | 1.00 | 124 | https://youtu.be/McNXHRM9n4I?t=1600 |
| September 18, 2021 | Booooring | Winners 3 | Win | KO | 1.16 | 112 | https://youtu.be/McNXHRM9n4I?t=13369 |
| September 18, 2021 | Razor Storm | Winners 4 | Win | KO | 1.00 | 35 | https://youtu.be/McNXHRM9n4I?t=20200 |
| September 18, 2021 | Murple | Winners 5 | Win | Judges Decision | 1.20 | 180 | https://youtu.be/McNXHRM9n4I?t=25276 |
| September 18, 2021 | Judge's Dream | Winners 6 | Win | Judges Decision | 1.21 | 180 | https://youtu.be/McNXHRM9n4I?t=28269 |
| September 18, 2021 | Dark Princess | Winners Semifinal | Win | KO | 1.43 | 73 | https://youtu.be/9yJIdpltHgg?t=831 |
| September 18, 2021 | Judge's Dream | Final | Win | Judges Decision | 1.46 | 180 | https://youtu.be/9yJIdpltHgg?t=9587 |
| November 13, 2021 | Spartan | Winners 2 | Loss | KO | -1.30 | 162 | https://youtu.be/ds70uaP__A4?t=7671 |
| November 13, 2021 | Pinevictus | Losers 1 | Loss | Forfeit | 0.00 | ||
| December 18, 2021 | Voxel (3lb) | Winners 1 | Win | KO | 1.19 | 84 | https://youtu.be/3Vdh8qNF0ww?t=8046 |
| December 18, 2021 | Starchild | Winners 2 | Win | KO | 1.07 | 162 | https://youtu.be/3Vdh8qNF0ww?t=11622 |
| December 18, 2021 | Lynx | Winners 3 | Loss | Judges Decision | -1.00 | 180 | https://youtu.be/3Vdh8qNF0ww?t=17567 |
| December 18, 2021 | Caldera | Losers 4 | Loss | Judges Decision | -1.03 | 180 | https://youtu.be/BkGCy7H9FPk?t=3959 |
| April 23, 2022 | Arr See Saw | Undefeated 1 | Win | KO | 1.00 | 148 | https://youtu.be/wf528BQr0eA?t=5768 |
| April 23, 2022 | Scab Armour | Undefeated 2 | Win | KO | 1.00 | 147 | https://youtu.be/wf528BQr0eA?t=12098 |
| April 23, 2022 | Chubby Unicorn | Undefeated 3 | Loss | KO | -1.06 | 78 | https://youtu.be/wf528BQr0eA?t=18456 |
| April 23, 2022 | Hurt Caboose | Elimination 4 | Loss | KO | -1.00 | 179 | https://youtu.be/wf528BQr0eA?t=28455 |
| September 17, 2022 | Crisis (II) | Undefeated Round 2 | Win | KO | 1.02 | 128 | https://youtu.be/HXstJoqMM-c?t=8052 |
| September 17, 2022 | Ablation | Undefeated Round 3 | Win | Judges Decision | 1.00 | 180 | https://youtu.be/HXstJoqMM-c?t=22172 |
| September 17, 2022 | Hound | Undefeated Round 4 | Loss | Judges Decision | -1.00 | 180 | https://youtu.be/HXstJoqMM-c?t=30980 |
| September 17, 2022 | Eruption | Elimination Round 5 | Loss | KO | -1.00 | 119 | https://youtu.be/HXstJoqMM-c?t=33629 |
| November 12, 2022 | HiveLighter | Undefeated 2 | Win | KO | 1.00 | 117 | https://youtu.be/GrwhM8JogeE?t=13002 |
| November 12, 2022 | Professor Hex | Undefeated 3 | Win | KO | 1.00 | 22 | https://youtu.be/GrwhM8JogeE?t=25715 |
| November 12, 2022 | War?HARD! | Undefeated 4 | Win | Judges Decision | 1.00 | 180 | https://youtu.be/heNXK2dNk18?t=26595 |
| November 12, 2022 | Red Hawk | Undefeated Quarterfinals | Win | Judges Decision | 1.06 | 180 | https://youtu.be/GrwhM8JogeE?t=35293 |
| November 12, 2022 | Fully Defined | Undefeated Semifinals | Loss | Judges Decision | -0.75 | 180 | https://youtu.be/GrwhM8JogeE?t=38071 |
| November 12, 2022 | Chubby Unicorn | Elimination Quarterfinals | Win | Forfeit | 0.00 | ||
| November 12, 2022 | Polywog | Elimination Semifinal | Win | Judges Decision | 1.64 | 180 | https://youtu.be/FJy8_vYTLnQ?t=6524 |
| November 12, 2022 | Stoneforge | Elimination Final | Loss | Judges Decision | -0.75 | 180 | https://youtu.be/FJy8_vYTLnQ?t=8397 |
| December 17, 2022 | Komodo | Undefeated 1 | Win | Judges Decision | 1.09 | 180 | https://youtu.be/b79xlq1G41M?t=3253 |
| December 17, 2022 | Sepi01 | Undefeated 2 | Win | Judges Decision | 1.06 | 180 | https://youtu.be/b79xlq1G41M?t=8135 |
| December 17, 2022 | Chubby Unicorn | Undefeated Quarterfinals | Win | Judges Decision | 1.20 | 180 | https://youtu.be/b79xlq1G41M?t=16058 |
| December 17, 2022 | Eruption | Undefeated Semifinals | Win | Judges Decision | 1.34 | 180 | https://youtu.be/b79xlq1G41M?t=24553 |
| December 17, 2022 | Lynx | Undefeated Final | Loss | KO | -0.75 | 55 | https://youtu.be/b79xlq1G41M?t=30039 |
| December 17, 2022 | Polywog | Elimination Final | Loss | KO | -0.75 | 173 | https://youtu.be/b79xlq1G41M?t=39285 |
| March 18, 2023 | Plot Twist | Boss | Win | Judges Decision | |||
| March 18, 2023 | Black Havoc | Round 2 | Win | KO | 84 | https://youtu.be/RyjtWMjVV2k?t=6133 | |
| March 18, 2023 | Dutch Oven | Round 3 | Win | Forfeit | |||
| March 18, 2023 | Kamino | Round 4 | Win | Judges Decision | 180 | https://youtu.be/RyjtWMjVV2k?t=18459 | |
| March 18, 2023 | Voxel v;1 | Round 5 | Loss | Judges Decision | 180 | https://www.youtube.com/live/xQTbCkwBmD4?feature=share&t=39404 | |
| March 2, 2024 | Black Beans | Qualifiers Rd. 1 | Win | Forfeit | |||
| March 2, 2024 | Ghastly | Qualifiers Rd. 2 | Win | Judges Decision | 180 | https://brettzone.nhrl.io/brettZone/fightReview.php?gameID=EX-d82621bd34644b5f&tournamentID=nhrl_mar24_3lb | |
| March 2, 2024 | Onna-musha | Round of 32 | Loss | Tapout | 22 | https://brettzone.nhrl.io/brettZone/fightReview.php?gameID=W-34&tournamentID=nhrl_mar24_3lb | |
| May 3, 2025 | Zmeya | Prelim Rd. 1 | Win | Judges Decision | 1.00 | 180 | https://brettzone.nhrl.io/brettZone/fightReview.php?gameID=EX-cf8613814ca9445b&tournamentID=nhrl_may25_3lb |
| May 3, 2025 | Snowdrift | Prelim Rd. 2 | Loss | Judges Decision | -1.08 | 180 | https://brettzone.nhrl.io/brettZone/fightReview.php?gameID=EX-e05e01b3c117482f&tournamentID=nhrl_may25_3lb |
| May 3, 2025 | TAILSPIN | Prelim Rd. 3 | Loss | Tapout | -1.17 | 40 | https://brettzone.nhrl.io/brettZone/fightReview.php?gameID=EX-a2d2bfb4c72e4152&tournamentID=nhrl_may25_3lb |
| November 1, 2025 | Skyhook | Prelims Rd. 1 | Win | Tapout | 1.00 | 65 | https://brettzone.nhrl.io/brettZone/fightReview.php?gameID=EX-2b1e695e19484517&tournamentID=nhrl_nov25_3lb |
| November 1, 2025 | Prince | Prelims Rd. 2 | Loss | Tapout | -1.00 | 75 | https://brettzone.nhrl.io/brettZone/fightReview.php?gameID=EX-c262ac90163f4374&tournamentID=nhrl_nov25_3lb |
| November 1, 2025 | Square | Prelims Rd. 3 | Win | KO | 1.00 | 117 | https://brettzone.nhrl.io/brettZone/fightReview.php?gameID=EX-86a5b32403df402f&tournamentID=nhrl_nov25_3lb |
| November 1, 2025 | Temporal Terror | Round of 48 | Win | Judges Decision | 1.00 | 180 | https://brettzone.nhrl.io/brettZone/fightReview.php?gameID=W-13&tournamentID=nhrl_nov25_3lb |
| November 1, 2025 | Comet | Round of 32 | Win | KO | 1.32 | 68 | https://brettzone.nhrl.io/brettZone/fightReview.php?gameID=W-38&tournamentID=nhrl_nov25_3lb |
| November 1, 2025 | Colossus | Round of 16 | Win | Judges Decision | 1.14 | 180 | https://brettzone.nhrl.io/brettZone/fightReview.php?gameID=W-51&tournamentID=nhrl_nov25_3lb |
| November 1, 2025 | Actual Size | Quarterfinals | Win | Judges Decision | 1.02 | 180 | https://brettzone.nhrl.io/brettZone/fightReview.php?gameID=W-57&tournamentID=nhrl_nov25_3lb |
| November 1, 2025 | Sir Slicey | Semifinals | Loss | Judges Decision | -0.50 | 180 | https://brettzone.nhrl.io/brettZone/fightReview.php?gameID=W-60&tournamentID=nhrl_nov25_3lb |
| December 6, 2025 | Sir Slicey | Prelims Rd. 1 | Loss | KO | -1.00 | 136 | https://brettzone.nhrl.io/brettZone/fightReview.php?gameID=EX-c39e9446c8f546f4&tournamentID=nhrl_dec25_3lb |
| December 6, 2025 | Jackalope | Prelims Rd. 2 | Loss | KO | -1.00 | 125 | https://brettzone.nhrl.io/brettZone/fightReview.php?gameID=EX-178afecd16c8470f&tournamentID=nhrl_dec25_3lb |
| March 7, 2026 | [[]] | Prelims Rd. 1 | Win | Tapout | 1.00 | 77 | https://brettzone.nhrl.io/brettZone/fightReview.php?gameID=EX-9a93e69007ad4284&tournamentID=nhrl_mar26_3lb_ |
| March 7, 2026 | Blink | Prelims Rd. 2 | Win | Forfeit (Prelim) | 1.00 | ||
| March 7, 2026 | Bee-Roll | Round of 32 | Win | Judges Decision | 1.00 | 180 | https://brettzone.nhrl.io/brettZone/fightReview.php?gameID=W-41&tournamentID=nhrl_mar26_3lb_ |
| March 7, 2026 | Chainsaw Kitty | Round of 16 | Loss | Judges Decision | -1.00 | 180 | https://brettzone.nhrl.io/brettZone/fightReview.php?gameID=W-52&tournamentID=nhrl_mar26_3lb_ |
| April 4, 2026 | [[]] | Prelims Rd. 1 | Win | KO | 159 | ||
| April 4, 2026 | Pretty In Pink | Prelims Rd. 2 | Win | Tapout | 115 | ||
| April 4, 2026 | Zenith (II) | Round of 32 | Loss | Tapout | 86 | ||
| May 2, 2026 | [[]] | Prelims Rd. 1 | Win | Forfeit (Prelim) | |||
| May 2, 2026 | Cicero | Prelims Rd. 2 | Loss | KO | 29 | ||
| May 2, 2026 | [[]] | Prelims Rd. 3 | Win | Judges Decision | 180 | ||
| May 2, 2026 | Ironhide | Play-in Round | Win | Judges Decision | 180 | ||
| May 2, 2026 | Anubis | Round of 32 | Loss | Judges Decision | 180 | ||
| May 16, 2026 | TurboFIEND | Prelims Rd. 1 | Win | KO | 21 | ||
| May 16, 2026 | TurboFIEND | Prelims Rd. 1 | Loss | Judges Decision | 180 | ||
| May 16, 2026 | Anubis | Prelims Rd. 2 | Loss | Judges Decision | 180 | ||
| May 16, 2026 | Anubis | Prelims Rd. 2 | Loss | KO | 75 | ||
| May 16, 2026 | THE WALL PT2 | Prelims Rd. 3 | Loss | Judges Decision | 180 | ||
| May 16, 2026 | THE WALL PT2 | Prelims Rd. 3 | Loss | KO | 50 |
* Forfeits before the 2024 season are not counted in a bot's W-L record. Forfeits from 2024 and on are counted in a bot's W-L record.
For more information on how points are calculated for rankings, click here.
Click "Expand" to see this table.
Gallery
-

Project Liftoff vs Komodo
-
Project Liftoff vs Lynx
-
Project Liftoff at May 2026 NHRL
-

Team Liftoff at December 2022 NHRL
-

FlipNCut
-

Deepmelt





Acknowledgments
The Project LiftOff team would like to thank: