[[File:Projectliftoff 3lb Sept22.png|thumb|Project Liftoff at NHRL September 2022]]
Project LiftOff is a 3lbs MeltyBrain (a robot that moves using translations drift as its entire body spins at 1000 to 3000 RPM.
[[File:LiftoffTPU.jpg|thumb|Project Liftoff - February 2022 (rev 6.0) Pictured before Motorama Robot Conflict]]
[[File:Project Liftoff - September 2021 (rev 5.0).jpg|thumb|Project Liftoff - September 2021 (rev 5.0), pictured before the September 2021 event. The bot went on to go undefeated, winning the 3lb division with 4 KOs and 3 judges decisions.]]
Project Liftoff is a 3lb MeltyBrain (a robot that moves using translational drift) as its entire body spins at 2000 to 4000 RPM.
Project LiftOff does <u>'''not'''</u> use an IR-beacon. It has dual IR-sensors in it that can be used to sense how far objects are in every direction; these can be used by the driver-controlled versions (Project LiftOff and Flip-N-Cut), and are required by the autonomous version (DeepMelt).
'''This page was created by copying the "source HTML" from Shreking Ball. ''<u>It will be updated shortly.</u>'''''
Dual directional LEDs (on top/bottom and front/back) are used to indicate direction relative to the Bot (not the earth/cage). When the Bot is "tuned" these LEDs do not drift, but will change direction as the Bot ricochets around the cage. The driver must learn to drive the Bot relative to its "front" (the green LED) just like most other Bots.
Shreking Ball, to my knowledge, is the first (and possibly last) of its kind. It bears some resemblance to TUZI (a Chinese competitor robot which fought in Season 2 of ''King of Bots''). Shreking Ball's two sides are locked together form a solid shell that spins as one unit (TUZI's two sides were really wheels shaped as half-spheres).
As of Nov/Dec 2022, Project Liftoff is in it's 7th design iteration.
[[File:Project Liftoff a March-2019.jpg|alt=|thumb|Project Liftoff - March 2019 (rev 1.0)]]
* Rev-1.0 : March 2019
** Processor: Arduino Nano
** Accelerometer: common MPU 6050 (+/- 16g 12 bits)
** Receiver Interface: standard RC-PWM into UART
** Motor Control: OneShot125 via PWM manipulation @ ~800Hz
** External Sensors: none
* Rev-1.1 May 2019
** switched from 8" Aluminum rings to 9" AR-500 ring with tooth (and hand cut HDPE)
*** this AR-500 tooth proved to be too pointed and became embedded in arena wall several times
[[File:Project LiftOff b May-2019.jpg|alt=|thumb|Project Liftoff - May 2019 (rev 1.1)]]
[[File:Project LiftOff c Aug-2019.jpg|alt=|thumb|Project Liftoff - August 2019 (rev 1.2)]]
[[File:Project LiftOff d2 Sir Pops Alot Aug-2019.jpg|alt=|thumb|Sir Pops A Lot (derivative) - August 2019 (rev 1.15)]]
* Rev-2.0 : 2020
** Processor: Teensy 4.0
** Accelerometer: none… used motor eRPM telemetry from ESCs via bidirectional dShot
** Receiver Interface: RC-SBUS into UART
** Motor Control: dShot600 via SPI manipulation @ 8000Hz
** External Sensors: active IR
** CNC'd HDPE body
** New 8" AR-500 ring and tooth (with a more blunt tip)
[[File:Project Liftoff July-2020.jpg|alt=|thumb|Project Liftoff - July 2020 (rev 2.0)]]
[[File:Project LiftOff f Flip n Cut July-2020.jpg|alt=|thumb|Flip N' Cut (derivative) - July 2020 (rev 2.05)]]
[[File:Project LiftOff g Sept-2020.jpg|alt=|thumb|Project Liftoff - September 2020 (rev 2.1)]]
* Rev-3 : 2021 Same electronics as Rev-2; improved algorithm, wheel orientation, and return to accelerometer (see March-2021 picture below).[[File:PXL 20210320 135444503.jpg|thumb|Project Liftoff - March 2021 (rev 3.0)]]
** Processor: Teensy 4.0
** Accelerometer: H3LIS331DL (+/- 400g 16 bits)
** Receiver Interface: RC-SBUS into UART
** Motor Control: dShot600 via SPI manipulation @ 8000Hz
** External Sensors: active IR
** changed to 4S (from 3S)
** Other Details:
*** Switched to a "Motor Pod" that is sandwhich'd by two clam shell HDPE halves.
*** Put wheels in-line with weapon tooth (what was Jim thinking).
* Rev-4 : 2021 (May-2021 and July-2021) Same as Rev-3 except:
** Quest for a more durable motor...
*** May-2021: created a custom motor with internal thrust bearing with "no-name" motors (internal thrust bearing still failed by the third fight).
*** July-2021: Put a thrust bearing inside a PropDrive motor
**** Combing a PD-2826 stator with a PD-2830 motor-can gave the needed room. Could do the same thing with a PD-2830 stator and a PD-2836 motor-can (the PD-2836 is really a 2834, 4mm larger than the PD-2830).
**** This motor sacrificed power for durability. It was durable... however, it changed the failure point to the set screws and motor axle.
** Wheel Axis returning to 90 degrees from weapon
*** when wheels are inline with the weapon, the hockey-pucking is far worse.
** Making weight distribution fully symmetric...
*** a large counter-balance weight opposite (single tooth) weapon increases hockey-pucking... an impact causes the tooth to stop, but the other side of the Bot goes flying due to its own momentum.
*** change to fully symmetric two weapon teeth, allowing us to avoid a large counter balance weight.
** changed to full round HDPE body
*** prior HDPE cut-outs were to save weight
*** prior circular AR-500 weapon ring kept wall collisions "safer" and minimized pinning risk, and allowed us to hollow-out the HDPE.
*** re-design and re-cut of HDPE shell.
** weapon ring changes
*** make weapon ring narrower to decrease weight to offset increase in HDPE
*** remove bolt holes from weapon ring (to maximize its strength)
** [[File:MotoramaTPU.jpg|thumb|Project Liftoff - Side profile (rev 6.0)]]July-2021: first usage of titanium wheels. Thank you to Joe Fabbiani (Smeeeeh) and Calvin Iba (Lynx) for sharing the idea and showing the way - see Lynx May-2021 competition.
* Rev-5 : Sept-2021 Same as Rev-4 except:
** Major Motor redesign
*** Switched from PropDrive 2830 to PropDrive 2836.
**** more power.
*** Changed to a Hub Motor wheel attachment
**** 6mm dead axle
**** two 626 bearings (1000+ pounds of dynamic load)
**** custom machined aluminum inner (motor-can) and out (wheel) hubs
***** done on home CNC machine (0.2mm layer height)
**** titanium wheels (via send-cut-send)
**** no more set screw failures!
**** Thank you to Brian Boxell (Eruption) for giving us some direction, encouragement, and help on Hub Motors.
** Yet another AR-500 weapon ring re-design
*** Needed to find 80+ grams to offset the increased weight from the above Hub Motors.
*** Same 0.25" AR-500, but...
**** via send-cut-send.
**** Previous 326g (almost a full round circle) to 241g (almost rectangular)
**** Still no holes, very tapered/narrow in the middle.
** Both the above required a re-design of HDPE shell.
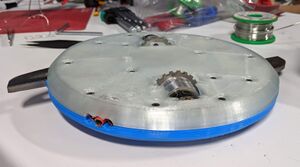
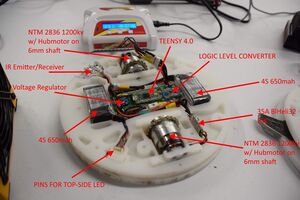
* [[File:Annotated Project LiftOff Internals.jpg|thumb|Annotated Image of Sept-2021 Project LiftOff internals. The accelerometer and RC receiver are on the underside of the PCB.]]Rev-5 Issues that we had hoped to address for Nov-2021 :
** In the "first attempt" of CNC'ing aluminum I made several mistakes that led to slight defects in the motor hubs (leading to non-alingment in the Hub Motors that were used... rubbing/friction/added heat/lost power).
*** Over-clamping & un-even clamping.
*** Slight alignment issues with double sided parts.
** We never (software) tuned Project LiftOff... we were making hardware fixes until midnight on Friday.
*** The controls were upside down and backwards all day on Saturday.
*** The IR object/wall detection was never used since it was so misaligned.
** Possibly make some ESC changes to improve drift performance.
** Continue to ponder how to avoid "hockey pucking".
** "Save the Arena Floor" upgrade...
*** We will modify the software to take advantage of the wheel telemetry information we have (via bidirectional dShot) to avoid "spinning our wheels".
*** This will not only stop us from ripping apart the arena floor (like a saw blade), but:
**** It will be much quieter.
**** It should enable us to spin up much faster (using static friction instead of dynamic friction).
* <br />Rev-6 : February-2022 Same as Rev-5 except:
** Major Shell Redesign
*** After failures during the December finals, we have decided to move away from UHMW or HDPE as shell materials. These materials were too prone to failure around the metal ring.
*** The outer shells are now printed out of TPU plastic.
*** Smaller batteries
** New AR500 weapon options
*** Long reach weapon, made of stacked 1/8" AR500.
**** via send-cut-send.
**** Allows us to play the reach game with other horizontals, and keeps big wheel bots away from our chassis.
**** Functional, but requires an add-on board that is hard to fit in 3 pound bot.
**** Provides battery, temp, and speed telemetry in real time
*** Smarter layout, better components.
* <br />Rev7 changes (Sept/Nov/December 2022)
** Changed shell layout to allow...
*** rotated hub motors so wheels are outward (instead of inward).
**** This provides a better "gear ratio", giving more torque to spin up (but decreases the final speed).
*** New PCB layout to accommodate...
**** multiple accelerometers, fewer parts, different parts
*** Better machined Inner/Outer Hubs
*** Thinner Titanium wheels.
** Software improvements for better drifting
** (Finally) did revision 1 of autonomous software
Shreking Ball rolls around the arena like a "mad hamster stuck in a ball". It has an internal reaction wheel which can be used to rotate the bot, but the weight of the reaction wheel was undersized and turned the bot too slowly for competition.
===Robot Facts===
===Robot Facts===
The first appearance was at the November2020 NHRL event. Itfeaturesa(mostly)verticalspinnerweapon,embeddedinsidetheballthatprotrudes0.75" outsidetheball.ThemainbodyisvaryingthicknessesofHDPE, cut with CNC. The two endsthat cap the sphere are TPU. The internal weapon pulleys and drive gearing are 3D printed nylon.
The first appearance was at the March 2019 NHRL event. The very first version used an 8" diameter aluminum pipe cut into two 1/2" thick slices with a notch cut out for the AR500 tooth (with two bolt holes).
Since then, Liftoff has used several laser or waterjet-cut AR500 steel rings. These rings have been sandwiched or otherwise mounted to CNC'd UHMW/HDPE or 3D printed TPU bodies that contain the primary electronics and battery. This has proven to be a durable, and adaptable construction method.
{| class="wikitable" style="width: 60%"
{| class="wikitable" style="width: 60%"
|-
|-
Line 15:
Line 135:
|Weight Class||[[3lb Weight Class|3lb]]
|Weight Class||[[3lb Weight Class|3lb]]
|-
|-
|Body Material||HDPE (CNC) + AR500
|Body Material||TPU, HDPE, AR500
|-
|-
|Weapon||Horizontal Body Spinner, 1360 grams
|Weapon||Meltybrain Spinner
|-
|-
|Weapon Drive||see below
|Weapon Drive||NA
|-
|-
|Drive||2 x FliteTest2218Brushless Motor, directdrive
|Drive||2 x Propdrive 2836 1200kv, 1.55" Titanium "Cleat" Wheels
There are several big issues with this design approach:
{{Bot Stats|bot=Project_LiftOff|class=3lb}}
*'''Directional Control''' - Shreking Ball can move quickly forward or backward, however, it cannot turn quickly. An internal reaction wheel was added directly centered on the vertical axis, but it was undersized (in order to stay within its weight requirement). Even then, powering the reaction wheel up/down would turn the ball, but if the down/up were done too quickly, the rotation would be reversed. The small size resulted in slow turns and not was not used during its matches.
*'''Weapon Reach and Orientation''': The weapon's reach was too minimal to create effective strikes; that coupled with the fact that the weapon tended to roll with the bot when it lost its footing made it hard to drive to weapon into the opponent.
[[File:ShrekingBall-CAD-1.png|thumb|CAD view of "right side" Shreking Ball]]
Strengths:
*Durability : Shreking Ball is close to indestructible. It is encased inside a thick durable shell, making it almost impossible to harm the internal robot.
==Tournament Results==
====2020====
{| class="wikitable" style="width: 60%"
|-
|NHRL January||Did Not Compete
|-
|NHRL July 1||Did Not Compete
|-
|NHRL July 2||Did Not Compete
|-
|NHRL September||Did Not Compete
|-
|NHRL November||0 Wins - 2 Losses
|}
[[File:ShrekingBall-CAD-2.png|thumb|Internal structure of Shreking Ball (no shell)]]
In its first fight in 2020, Shreking Ball went up against Droopy, which is also a 5 lbs bot with two very heavy and destructive horizontal spinners. The match was fun to watch... both bots went aggressively after each other and when Droopy made contact, Shreking Ball went flying. Needless to say, given Shreking Ball's lack of a controllable weapon, it did minimal damage to Droopy, while putting a few hundred cuts in the arena floor. Droopy landed some massive hits, which resulted in cracking one of Shreking Ball's rings (and adding 24 gashes around the rest of the bot). Shreking Ball made it to the end of the match, and Droopy was awarded the judges decision.
In its second match, Shreking Ball was up against Booooring. Given that both of these bots have minimal/ineffective weaponry, it was mesmerizing to watch the green glowing ball, but the match lacked the big hits of the first match. Given the length of repairs from the first match, Shreking Ball's battery was not completely charged and it ran out of power in the last 20 seconds of the match.
*Internal structure much heavier (thicker) than necessary. Much weight can be saved. (for that internal reaction wheel).
*Gearing was done the original way in order to use a brushless motor... would drop two stage gearing and switch to a single stage using a geared brushed motor. This will also save weight.
*Pondering other ways to make this ball more controllable... please share your insights.
*Might close up the ball completely and move the weapon to side edges.
[[Category:3lb Bots]]
[[Category:3lb Bots]]
[[Category:US Robots]]
[[Category:Meltybrain Spinners]]
[[Category:NHRL 2018-19]]
[[Category:NHRL 2020]]
[[Category:NHRL 2020]]
[[Category:NHRL 2021]]
[[Category:NHRL 2022]]
[[Category:NHRL 2023]]
[[Category:NHRL 2024]]
Latest revision as of 18:50, 19 August 2024
Project Liftoff at NHRL September 2022Project Liftoff - February 2022 (rev 6.0) Pictured before Motorama Robot ConflictProject Liftoff - September 2021 (rev 5.0), pictured before the September 2021 event. The bot went on to go undefeated, winning the 3lb division with 4 KOs and 3 judges decisions.
Project Liftoff is a 3lb MeltyBrain (a robot that moves using translational drift) as its entire body spins at 2000 to 4000 RPM.
Project LiftOff does not use an IR-beacon. It has dual IR-sensors in it that can be used to sense how far objects are in every direction; these can be used by the driver-controlled versions (Project LiftOff and Flip-N-Cut), and are required by the autonomous version (DeepMelt).
Dual directional LEDs (on top/bottom and front/back) are used to indicate direction relative to the Bot (not the earth/cage). When the Bot is "tuned" these LEDs do not drift, but will change direction as the Bot ricochets around the cage. The driver must learn to drive the Bot relative to its "front" (the green LED) just like most other Bots.
As of Nov/Dec 2022, Project Liftoff is in it's 7th design iteration.
Project Liftoff - March 2019 (rev 1.0)
Rev-1.0 : March 2019
Processor: Arduino Nano
Accelerometer: common MPU 6050 (+/- 16g 12 bits)
Receiver Interface: standard RC-PWM into UART
Motor Control: OneShot125 via PWM manipulation @ ~800Hz
External Sensors: none
Rev-1.1 May 2019
switched from 8" Aluminum rings to 9" AR-500 ring with tooth (and hand cut HDPE)
this AR-500 tooth proved to be too pointed and became embedded in arena wall several times
Project Liftoff - May 2019 (rev 1.1)Project Liftoff - August 2019 (rev 1.2)Sir Pops A Lot (derivative) - August 2019 (rev 1.15)
Rev-2.0 : 2020
Processor: Teensy 4.0
Accelerometer: none… used motor eRPM telemetry from ESCs via bidirectional dShot
Receiver Interface: RC-SBUS into UART
Motor Control: dShot600 via SPI manipulation @ 8000Hz
External Sensors: active IR
CNC'd HDPE body
New 8" AR-500 ring and tooth (with a more blunt tip)
Project Liftoff - July 2020 (rev 2.0)Flip N' Cut (derivative) - July 2020 (rev 2.05)Project Liftoff - September 2020 (rev 2.1)
Rev-3 : 2021 Same electronics as Rev-2; improved algorithm, wheel orientation, and return to accelerometer (see March-2021 picture below).Project Liftoff - March 2021 (rev 3.0)
Processor: Teensy 4.0
Accelerometer: H3LIS331DL (+/- 400g 16 bits)
Receiver Interface: RC-SBUS into UART
Motor Control: dShot600 via SPI manipulation @ 8000Hz
External Sensors: active IR
changed to 4S (from 3S)
Other Details:
Switched to a "Motor Pod" that is sandwhich'd by two clam shell HDPE halves.
Put wheels in-line with weapon tooth (what was Jim thinking).
Rev-4 : 2021 (May-2021 and July-2021) Same as Rev-3 except:
Quest for a more durable motor...
May-2021: created a custom motor with internal thrust bearing with "no-name" motors (internal thrust bearing still failed by the third fight).
July-2021: Put a thrust bearing inside a PropDrive motor
Combing a PD-2826 stator with a PD-2830 motor-can gave the needed room. Could do the same thing with a PD-2830 stator and a PD-2836 motor-can (the PD-2836 is really a 2834, 4mm larger than the PD-2830).
This motor sacrificed power for durability. It was durable... however, it changed the failure point to the set screws and motor axle.
Wheel Axis returning to 90 degrees from weapon
when wheels are inline with the weapon, the hockey-pucking is far worse.
Making weight distribution fully symmetric...
a large counter-balance weight opposite (single tooth) weapon increases hockey-pucking... an impact causes the tooth to stop, but the other side of the Bot goes flying due to its own momentum.
change to fully symmetric two weapon teeth, allowing us to avoid a large counter balance weight.
changed to full round HDPE body
prior HDPE cut-outs were to save weight
prior circular AR-500 weapon ring kept wall collisions "safer" and minimized pinning risk, and allowed us to hollow-out the HDPE.
re-design and re-cut of HDPE shell.
weapon ring changes
make weapon ring narrower to decrease weight to offset increase in HDPE
remove bolt holes from weapon ring (to maximize its strength)
Project Liftoff - Side profile (rev 6.0)July-2021: first usage of titanium wheels. Thank you to Joe Fabbiani (Smeeeeh) and Calvin Iba (Lynx) for sharing the idea and showing the way - see Lynx May-2021 competition.
Rev-5 : Sept-2021 Same as Rev-4 except:
Major Motor redesign
Switched from PropDrive 2830 to PropDrive 2836.
more power.
Changed to a Hub Motor wheel attachment
6mm dead axle
two 626 bearings (1000+ pounds of dynamic load)
custom machined aluminum inner (motor-can) and out (wheel) hubs
done on home CNC machine (0.2mm layer height)
titanium wheels (via send-cut-send)
no more set screw failures!
Thank you to Brian Boxell (Eruption) for giving us some direction, encouragement, and help on Hub Motors.
Yet another AR-500 weapon ring re-design
Needed to find 80+ grams to offset the increased weight from the above Hub Motors.
Same 0.25" AR-500, but...
via send-cut-send.
Previous 326g (almost a full round circle) to 241g (almost rectangular)
Still no holes, very tapered/narrow in the middle.
Both the above required a re-design of HDPE shell.
Annotated Image of Sept-2021 Project LiftOff internals. The accelerometer and RC receiver are on the underside of the PCB.Rev-5 Issues that we had hoped to address for Nov-2021 :
In the "first attempt" of CNC'ing aluminum I made several mistakes that led to slight defects in the motor hubs (leading to non-alingment in the Hub Motors that were used... rubbing/friction/added heat/lost power).
Over-clamping & un-even clamping.
Slight alignment issues with double sided parts.
We never (software) tuned Project LiftOff... we were making hardware fixes until midnight on Friday.
The controls were upside down and backwards all day on Saturday.
The IR object/wall detection was never used since it was so misaligned.
Possibly make some ESC changes to improve drift performance.
Continue to ponder how to avoid "hockey pucking".
"Save the Arena Floor" upgrade...
We will modify the software to take advantage of the wheel telemetry information we have (via bidirectional dShot) to avoid "spinning our wheels".
This will not only stop us from ripping apart the arena floor (like a saw blade), but:
It will be much quieter.
It should enable us to spin up much faster (using static friction instead of dynamic friction).
Rev-6 : February-2022 Same as Rev-5 except:
Major Shell Redesign
After failures during the December finals, we have decided to move away from UHMW or HDPE as shell materials. These materials were too prone to failure around the metal ring.
The outer shells are now printed out of TPU plastic.
Smaller batteries
New AR500 weapon options
Long reach weapon, made of stacked 1/8" AR500.
via send-cut-send.
Allows us to play the reach game with other horizontals, and keeps big wheel bots away from our chassis.
The first appearance was at the March 2019 NHRL event. The very first version used an 8" diameter aluminum pipe cut into two 1/2" thick slices with a notch cut out for the AR500 tooth (with two bolt holes).
Since then, Liftoff has used several laser or waterjet-cut AR500 steel rings. These rings have been sandwiched or otherwise mounted to CNC'd UHMW/HDPE or 3D printed TPU bodies that contain the primary electronics and battery. This has proven to be a durable, and adaptable construction method.


.jpg)