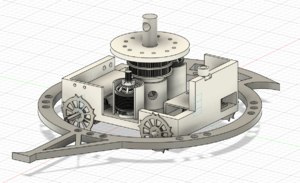
[[File:Inertial-v3-wip.jpg|thumb|Work in progress Inertial-v3]]
Inertial-v3 will compete at NHRL November 2025
<u>Notable changes</u>
* Everything. The entire bot was redesigned from the bottom up. The only components that survived the transition were the kakes, shoulder bolts, 20mm aluminum rod, and Repeat Ultras
<u>Design philosophy</u>
Some things worked well on v2
* The geared dual motor spin-up was excellent despite the high MOI of the shell and blade
* The TPU shell was excellent and survived a Chonkiv hit during the freestyle
* The TPU core was also excellent and survived getting roofed by Galaxi. The SPLA core in contrast exploded when it was shot up by The Invisible Hand
* The long counterbalanced tooth gave excellent reach
* The Repeat Ultras performed very well
Some things were very bad
* The battery being only velcro-d on (cringe) meant the bot would lose it's batteries often. See the Galaxi fight and the Chonkiv rumble.
** The complete lack of a top plate was my downfall multiple times
* The blade was too thin and prone to failing catastrophically. See the fight against The Invisible Hand.
* The shell was high infil instead of having a heavier blade. This is both a waste of material and of weight.
There were also some things left on the table
* Mobility is uniquely an almost non-concern for shell spinners, making shufflers a very easy potential power buff
* While everyone in the 12s loves the BA 2820, the shell is nearing the weight and MOI of a 30lb weapon, meaning we should look for 30lb weapon drive
* The internal gear ratio was also not ideal, leading to an impossible to reach max tip speed
* Everything relies on a single battery and a single switch, leading to those two both being single points of failure
So this design revision was based around addressing those problems, while attempting to keep all of the strengths of V2
V3 is a complete redesign that features
* Single-cam shuffler drive. See https://www.youtube.com/watch?v=BihBq9Li8uY for an excellent video on how to design one of these
* A geared 1:4 weapon drive with dual BA 3515
* The two halves have split batteries and switches, leading to the receiver being the only single point of failure (v4 will address this)
* A top plate. V2 did not in fact have a top plate
* A 1/2", 23" dia weapon blade
* A low infil shell with top stiffeners to fix the bending issues encountered during testing
[[File:Inertial-v2.jpg|thumb|Inertial-v2 at June 2025 NHRL]]
=== <u>V2</u> ===
Inertial-v2 competed at June 2025 NHRL, where it went 1-2
Due to the short turnaround between May and June, most of the DNA of the bot stayed the same from v1, with a few important changes
<u>Notable changes</u>
* Geared weapon drive instead of belted weapon drive
* A full TPU outer shell
* Metal 3d printed wheels that combined the pulley hubs and the cleats
* A slightly more sane weapon tooth profile
* Re-soldered electronics
=== <u>V1</u> ===
Inertial competed at it's inagural event in May 2025 at NHRL, where it fought in a single fight and forfieted it's second fight, going 0-2
Inertial-v1 had a number of ''interesting'' quirks
[[File:Inertial-v1-underside.png|thumb|The asymmetric drive motors on Inertial-v1]]
* Asymmetric drive: In order to fit everything in the shell, an asymmetric belted drive was chosen for Inertial-v1. This actually worked well despite of how jank it looks.
* [[File:Inertial-v1-side.png|thumb|A side profile of Inertial-v1, showing off the dual belted weapon system]]A S3M dual belted weapon drive. This belt profile does NOT work for a high-moi 12lb weapon
* The shell was half TPU and half NylonGF. This was a mistake, as you can see by Marshmallow ripping the nylon pieces to shreds during its first match
Along with a number of straight up design mistakes
[[File:Inertial-v1-top.png|thumb|The poorly designed blade and 90 degree rake angle]]
* The wheels and pulleys were attached with m1 screws. I could not find a hex key small enough to even turn them so "screwed" them in with pliers. This did not work, as evidenced by the wheels falling off BEFORE THE MATCH EVEN STARTED
* 90 degree rake angle. Need I say more?
The bot lost because of
* The wheels falling off
* The belts failing
* The shell being half nylonGF
* The electronics being poorly soldered and failling after the first match
Everything. The entire bot was redesigned from the bottom up. The only components that survived the transition were the kakes, shoulder bolts, 20mm aluminum rod, and Repeat Ultras
Design philosophy
Some things worked well on v2
The geared dual motor spin-up was excellent despite the high MOI of the shell and blade
The TPU shell was excellent and survived a Chonkiv hit during the freestyle
The TPU core was also excellent and survived getting roofed by Galaxi. The SPLA core in contrast exploded when it was shot up by The Invisible Hand
The long counterbalanced tooth gave excellent reach
The Repeat Ultras performed very well
Some things were very bad
The battery being only velcro-d on (cringe) meant the bot would lose it's batteries often. See the Galaxi fight and the Chonkiv rumble.
The complete lack of a top plate was my downfall multiple times
The blade was too thin and prone to failing catastrophically. See the fight against The Invisible Hand.
The shell was high infil instead of having a heavier blade. This is both a waste of material and of weight.
There were also some things left on the table
Mobility is uniquely an almost non-concern for shell spinners, making shufflers a very easy potential power buff
While everyone in the 12s loves the BA 2820, the shell is nearing the weight and MOI of a 30lb weapon, meaning we should look for 30lb weapon drive
The internal gear ratio was also not ideal, leading to an impossible to reach max tip speed
Everything relies on a single battery and a single switch, leading to those two both being single points of failure
So this design revision was based around addressing those problems, while attempting to keep all of the strengths of V2
The two halves have split batteries and switches, leading to the receiver being the only single point of failure (v4 will address this)
A top plate. V2 did not in fact have a top plate
A 1/2", 23" dia weapon blade
A low infil shell with top stiffeners to fix the bending issues encountered during testing
Inertial-v2 at June 2025 NHRL
V2
Inertial-v2 competed at June 2025 NHRL, where it went 1-2
Due to the short turnaround between May and June, most of the DNA of the bot stayed the same from v1, with a few important changes
Notable changes
Geared weapon drive instead of belted weapon drive
A full TPU outer shell
Metal 3d printed wheels that combined the pulley hubs and the cleats
A slightly more sane weapon tooth profile
Re-soldered electronics
V1
Inertial competed at it's inagural event in May 2025 at NHRL, where it fought in a single fight and forfieted it's second fight, going 0-2
Inertial-v1 had a number of interesting quirks
The asymmetric drive motors on Inertial-v1
Asymmetric drive: In order to fit everything in the shell, an asymmetric belted drive was chosen for Inertial-v1. This actually worked well despite of how jank it looks.
A side profile of Inertial-v1, showing off the dual belted weapon systemA S3M dual belted weapon drive. This belt profile does NOT work for a high-moi 12lb weapon
The shell was half TPU and half NylonGF. This was a mistake, as you can see by Marshmallow ripping the nylon pieces to shreds during its first match
Along with a number of straight up design mistakes
The poorly designed blade and 90 degree rake angle
The wheels and pulleys were attached with m1 screws. I could not find a hex key small enough to even turn them so "screwed" them in with pliers. This did not work, as evidenced by the wheels falling off BEFORE THE MATCH EVEN STARTED
90 degree rake angle. Need I say more?
The bot lost because of
The wheels falling off
The belts failing
The shell being half nylonGF
The electronics being poorly soldered and failling after the first match